Ich trage mich seit längerer Zeit mit dem Gedanken, mir eine Montierung selbst zu bauen, die in der Lage ist, auch größere Teleskope als meine GP-DX photographisch zu tragen.
Anfang 2003 hatte ich die Gelegenheit, von einem Astrofreund ein paar Teile eines unvollendeten Selbstbauprojektes zu erstehen. Hier handelt es sich vor allem um die Achsgehäuse, Achsen, Achs-Lager, Schneckenräder und Schnecken für eine Alu-Montierung.
Die wichtigsten Daten der Montierung sind folgende:
| Achs-Durchmesser an den Lagern | 50 bzw. 55 mm |
| Schneckenrad-Durchmesser | 120 mm |
| Maße Achsgehäuse | 110 x 110 x 175 mm |
| Schrägkugellager je Achse | 7210B und 7211B |
Als Steuerung ist der Vixen SkySensor 2000 PC geplant, den ich auch an meiner GP-DX im Einsatz habe.
Auf dieser Seite werde ich versuchen, die Fortschritte dieses Projektes zu dokumentieren, wobei der Schwerpunkt vermutlich Bilder sein werden. Bei Fragen bitte einfach kontaktieren.
Zuallererst habe ich mal versucht, die Montierung grob als 3D-Modell zu modellieren. Dazu habe ich den Cybermotion 3D-Designer genutzt, da dieser auch Kinematik unterstützt und ich daher vor dem Bau bereits testen wollte, ob in den durchaus nicht intuitiven vielfältigen Positionen einer deutschen Montierung keine Kollisionen der diversen Anbauten zu erwarten sind.
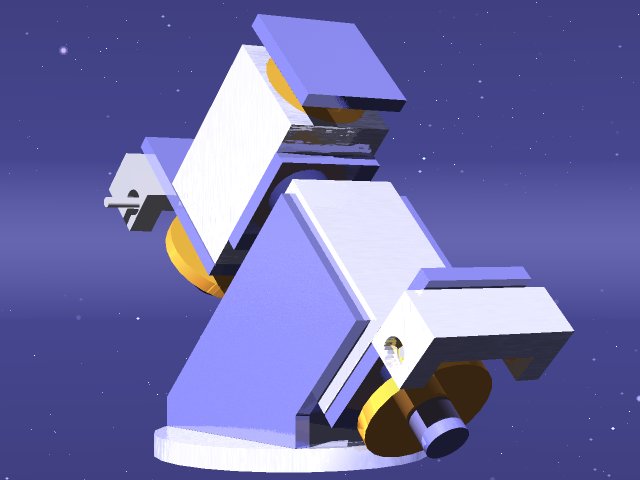
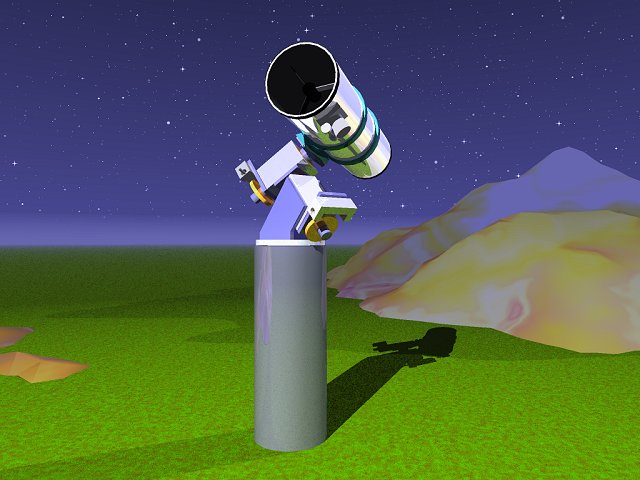
Die Bilder entsprechen nicht mehr der aktuellen Konstruktion, waren aber sehr hilfreich bei einigen grundlegenden Überlegungen.
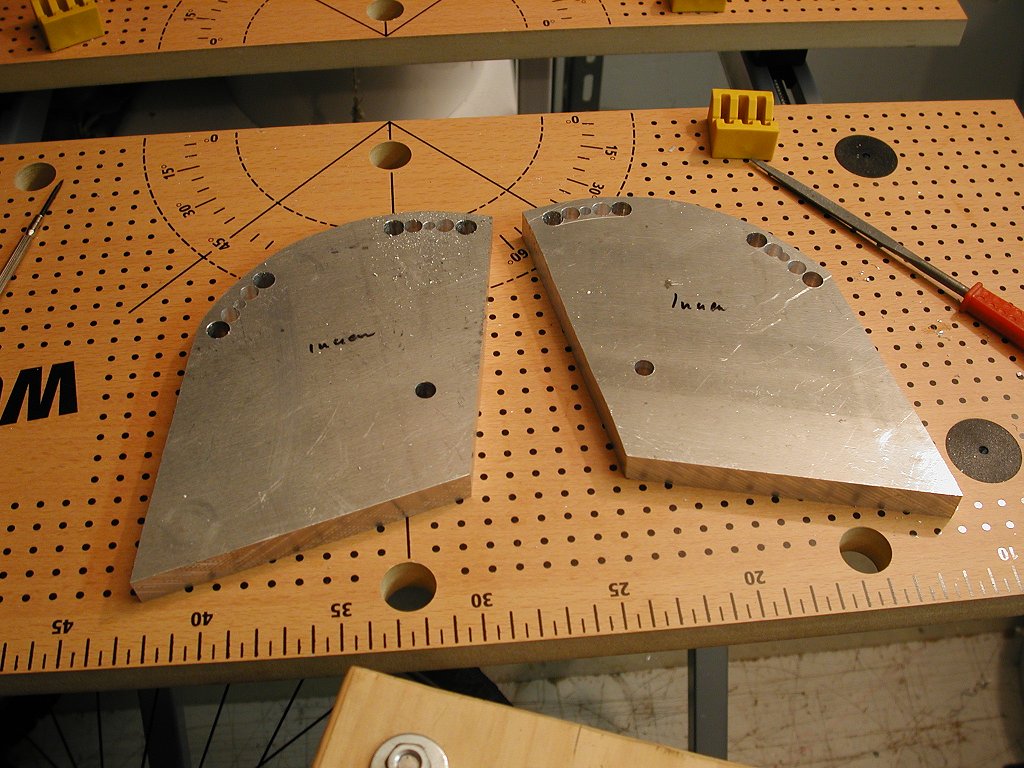
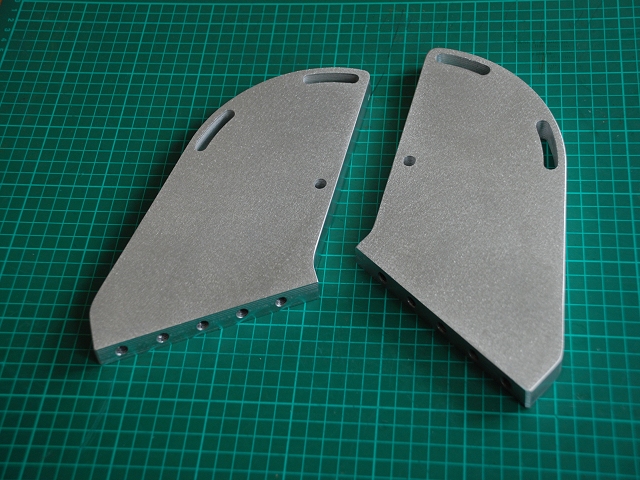
Der erste praktische Schritt war nun das Erstellen der Polbleche. Die Montierung soll in einem Bereich zwischen 40 Grad und 60 Grad nördlicher (oder auch südlicher) Breite einsetzbar sein. Daher entschied ich mich für Polbleche aus 15mm Aluminium-Platten, die ich mit der Stichsäge in die Grundform brachte (siehe Bild).
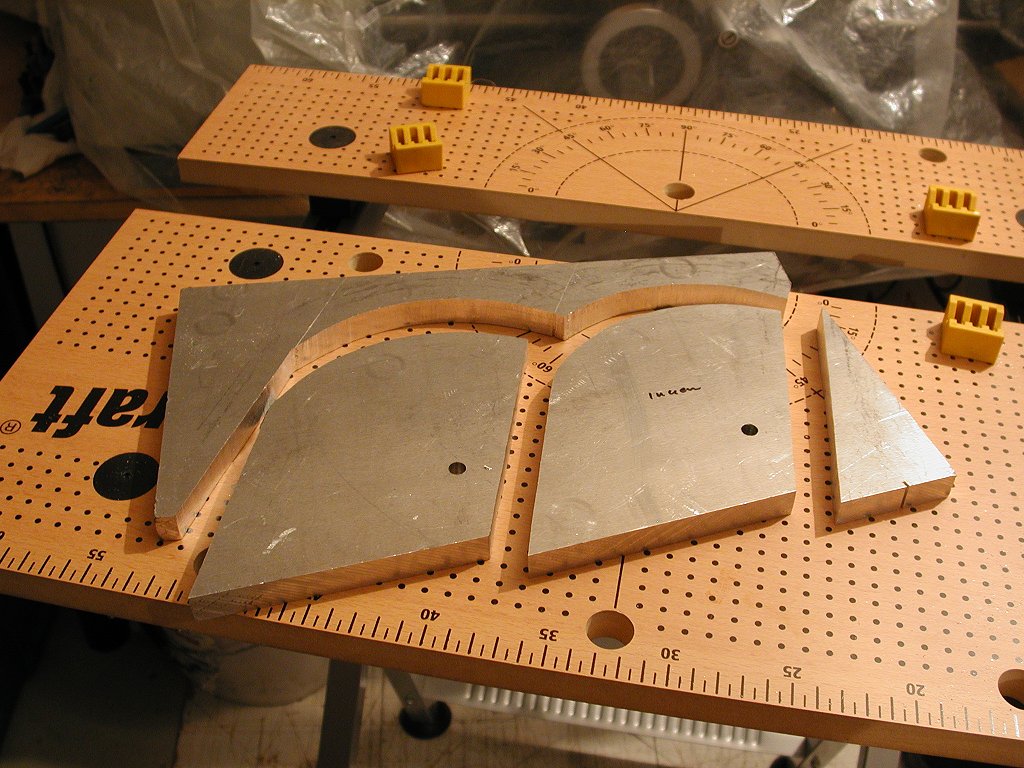
Anschließend mußte ich die Langlöcher für die Polhöhenverstellung mangels Fräsbank durch mehrere Bohrungen, Dremel und Feile erstellen..
Das folgende Bild zeigt ein Achsgehäuse provisorisch an den Polblechen montiert.
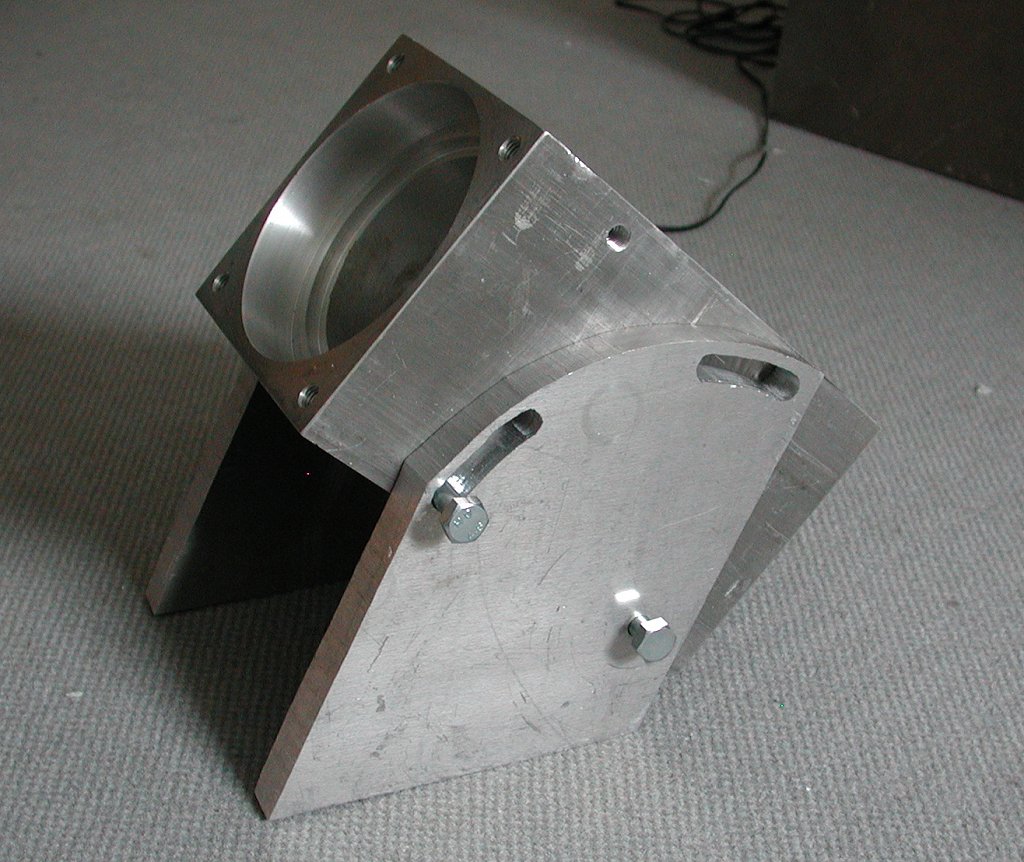
Da die Montierung später neben der Goto-Steuerung auch manuell bewegt werden soll, sind Kupplungen unerläßlich, die leicht eingestellt und gelöst werden können. Ich entschied mich hier für das gleiche Prinzip, daß auch in den bekannten OTE-Montierungen verwandt wird - die Hebelplattenkupplung. Hier wird durch Verkippen einer speziell geformten Hebelplatte ein hoher axialer Anpreßdruck auf das Schneckenrad ausgeübt, was zur Klemmung führt.
Die Kupplungsteile sind auf einer Drehbank relativ problemlos herstellbar, nur die Klemmplatte bereitete mir einiges Kopfzerbrechen. Normalerweise würde man so ein Teil auf der Fräsbank herstellen. Aber nach einigem Grübeln war ich letzlich in der Lage, diese Teile mit einer hohen Güte auch auf meiner Drehbank herzustellen.
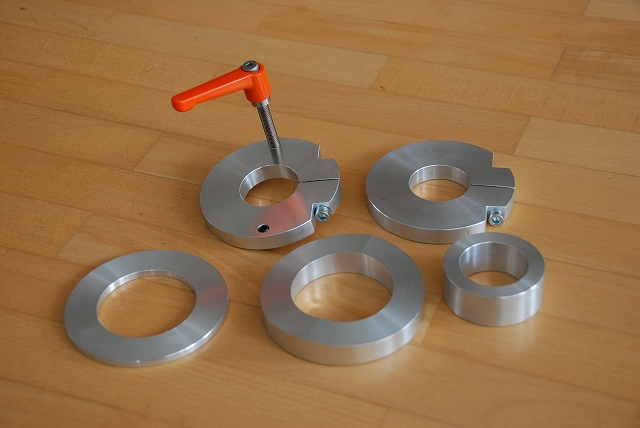
Auf folgendem Bild sind die Einzelteile der Hebelplattenkupplung zu sehen, sowie das Schneckenrad.

So sieht die montierte Kupplung auf der Achse aus.
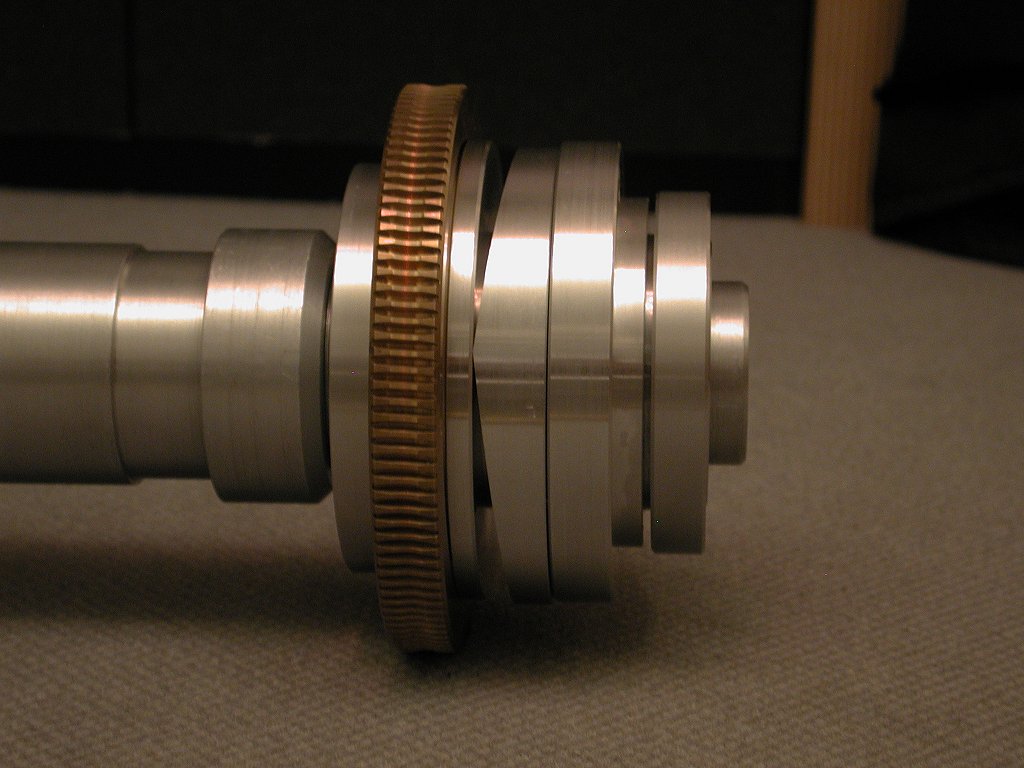
Kupplung mit Achse und Anschlußplatte für das 2. Achsgehäuse.

Ich habe die Kupplung komplett aus Aluminium hergestellt. Um eine höhere Oberflächenhärte und bessere Korrosionseigenschaften zu erzielen, habe ich die Teile anschließend (blau) eloxiert. Hier ist provisorisch eine Imbus-Schraube eingesetzt, die später durch einen Kipphebel ersetzt wird. Die Klemmwirkung dieser Kupplung ist enorm. Bereits ca. eine Viertelumdrehung an der Imbusschraube erzeugt eine sehr hohe Klemmkraft. Bleibt abzuwarten, wie sich die Konstruktion im harten Nacht-Einsatz bewähren wird.

Im nächsten Schritt sollen die Schneckenlager an den Achsgehäusen montiert werden.
.... to be continued ...
Mittlerweile ist es Anfang 2007 und ich habe aus diversen Gründen nicht weiter an der Montierung gebaut. Da ich nun aber 2 Teleskope besitze, die meine GP-DX überlasten (Intes Micro MN68 und ganz neu ein 6-Zoll TMB Apo), stieg meine Motivation drastisch an, das Projekt fortzuführen.
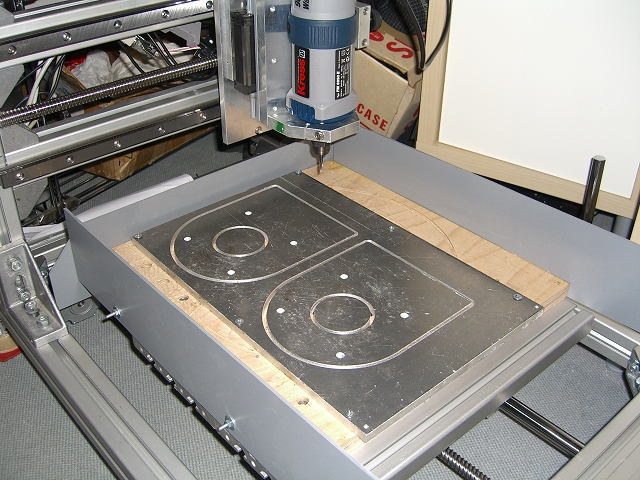
Mittlerweile hatte ich eine CNC-Fräse gebaut, die sich im weiteren Projektverlauf als sehr vorteilhaft erweisen sollte. Zuerst habe ich beschlossen, die Polbleche, die eh etwas kurz dimensioniert waren und alles andere als ansehnlich ausgefallen sind, neu zu machen.
Mit der Fräse kein größeres Problem, Fräszeit pro Blech (15mm Alu) ca. 30 Minuten. Sehen deutlich besser aus als die Vorgänger.
Jetzt ging es an die Bodenplatte, die die beiden Polbleche mittels je 5 Schrauben verbindet und die Azimuth-Feinverstellung ermöglichen soll. Auch hier hat die Fräse viel Zeit gespart (allerdings hatte ich mit diversen abreißenden Fräsern und anderen Tücken zu kämpfen).

Die Bodenplatte von unten mit den Senkungen für die Polblech-Schrauben. Es fehlen noch die Gewinde für die Feinverstellung.
Beim Konstruieren der Kupplung für die 2. Achse ist mir eine deutlich vereinfachte Variante eingefallen, die weniger Bauteile erfordert, leichter zu montieren ist und zusätzlich noch Bauraum spart. Hier die erforderlichen Teile, alle auf der Drehbank entstanden, teilweise anschließend noch gesägt.
Das folgende Bild zeigt die unterschiedlichen Varianten der Hebelplattenkupplung, links die ursprüngliche, rechts die vereinfachte Bauform.

So langsam läßt sich erahnen, wie die Montierung später aussehen wird.

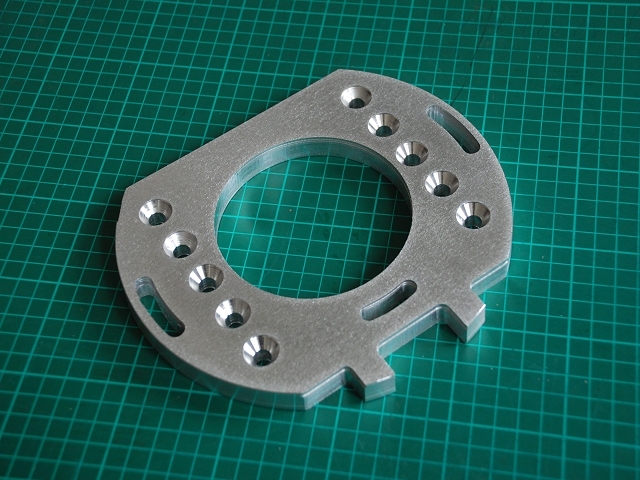
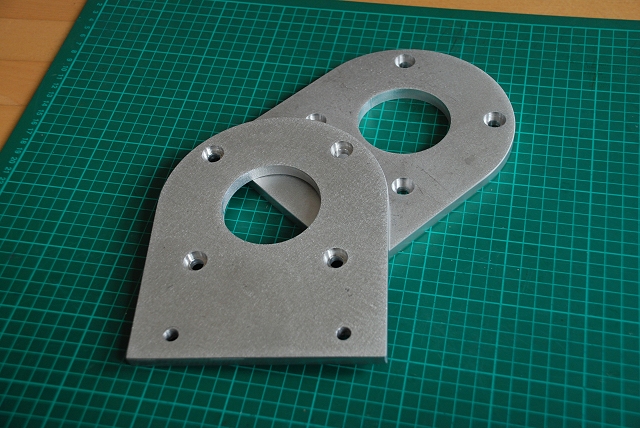
Der nächste Schritt war die Herstellung der Bleche, an denen die Schneckengehäuse befestigt werden. Dies geschah wieder auf der CNC-Fräse, Material ist 10mm Alublech.
Das Ergebnis mit gesenkten Schraublöchern zur Fixierung an den Achsgehäusen.
Aus 10mm V2A-Gewindematerial wurden die Aufhängungen für die Schneckengehäuse gefertigt. Diese sind im mittleren Bereich auf 4mm Durchmesser abgedreht, um ein Nachgeben der Schnecke bei zu hoher Belastung zu gewährleisten. Die Querbohrungen mit Gewinde dienen der Einstellung des Schneckenspiels.

Der ursprüngliche Plan, als Steuerung den SkySensor mit entsprechenden Servomotoren einzusetzen, wurde zwischenzeitlich durch die Gelegenheit verworfen, günstig eine Sphinx-Steuerung (StarBook) mit den entsprechenden Servomotoren zu bekommen.
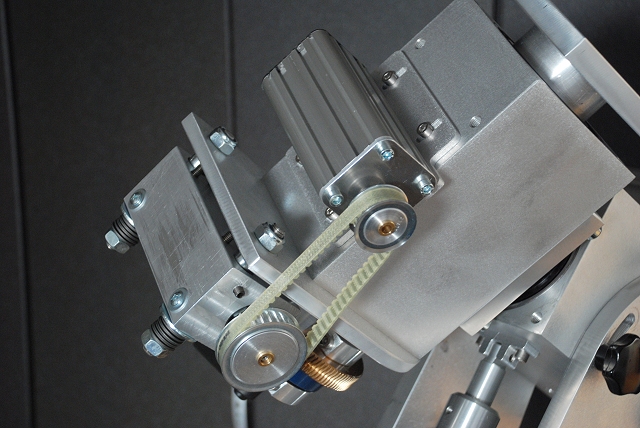
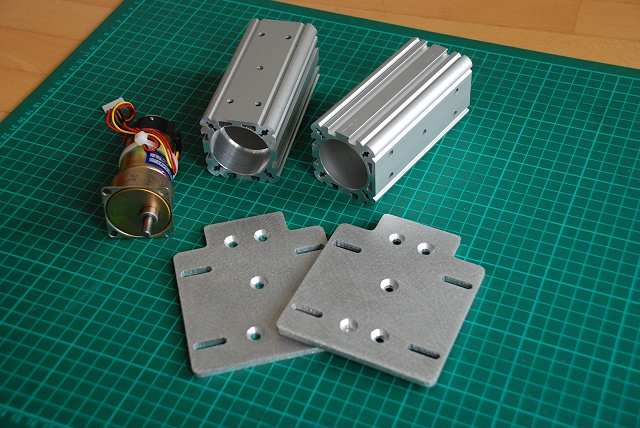
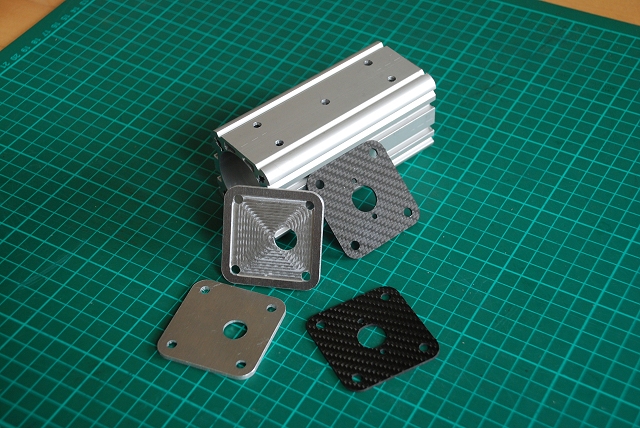
Hierzu wurden aus einem passenden Aluprofil (Schrottplatz, wie praktisch alles Alumaterial das Verwendung gefunden hat) die beiden Motorgehäuse hergestellt. Das folgende Bild zeigt die Gehäuse mit den aus 5mm Alu gefrästen Basisplatten, die über Langlöcher ein Einstellen der Zahnriemenspannung zulassen.
Die Frontplatten der Motorgehäuse sind so ausgefräst, daß sie die Anschlußplatte der Servomotoren aufnehmen (3mm Alu), während die rückseitigen Abdeckungen aus 1,5mm CfK gefräst wurden und Aussparungen für die Anschlußbuchsen besitzen. Das CfK wurde rein aus optischen Gründen eingesetzt, Alu wäre genauso gut gegangen, sieht aber weniger cool aus ;-)
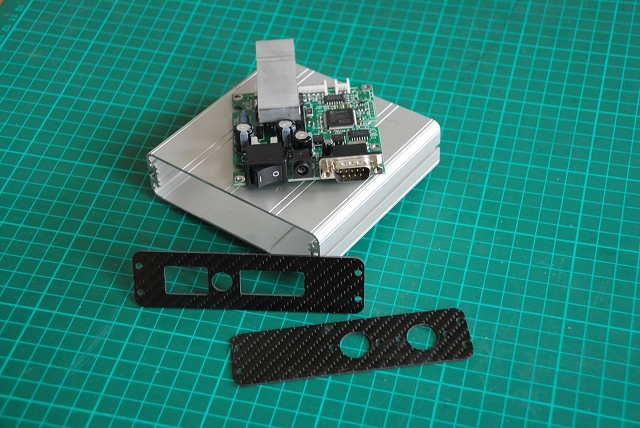
Für die Aufnahme der Motorelektronik wurde ein altes Modemgehäuse recycled, Front- und Rückplatte mit den entsprechenden Ausbrüchen wieder aus 1,5mm CfK gefräst. Macht einfach Spaß, wenn hinterher alles perfekt paßt und gerade sitzt.

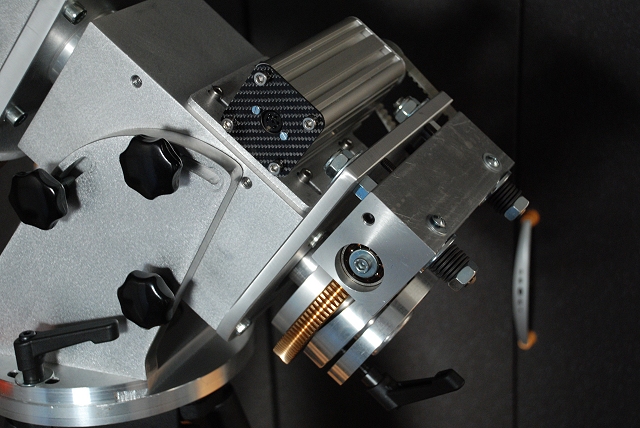
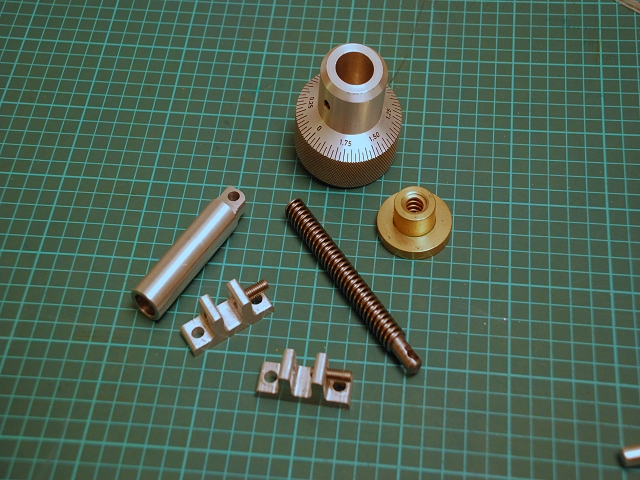
Als letztes Teil fehlte nun nur noch die Höhen-Feineinstellung. Hierzu wurden 2 Halterungen aus 15mm Alu gefräst. Als Gewinde kommt ein Stück Trapezgewindespindel mit entsprechender Spindelmutter zum Einsatz. In meiner Fundkiste vom Schrottplatz bot sich die Skaleneinheit mit Rändelung an, die schön griffig ist. Sie wurde so ausgedreht, daß die Spindelmutter eingesetzt werden kann.
Das folgende Bild zeigt die Feinverstellungen in beiden Achsen, sie funktionieren auch in der Praxis prima.

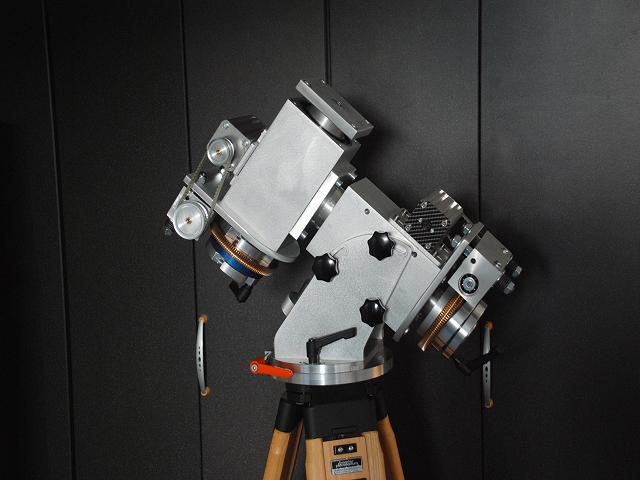
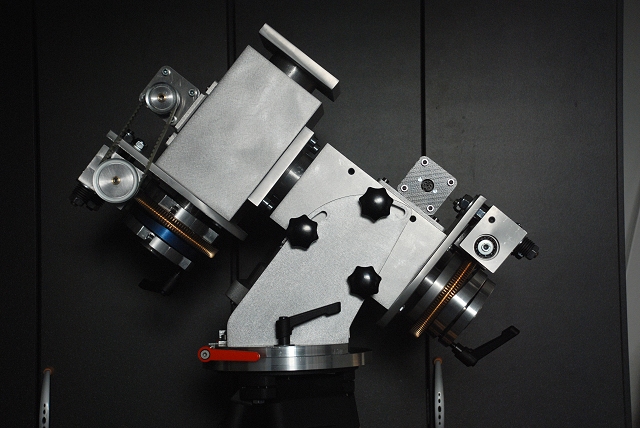
Nun folgen noch ein paar Detailansichten der Montierung. Sie wiegt ohne Gegengewichtstange 21,5 kg. Die Einstellung der Schnecken ist eine ziemlich aufwendige Sache und vermutlich werde ich bald auf den SkySensor als Steuerung umsteigen, da das StarBook doch sehr viel weniger Funktionen und Bedienkomfort besitzt. Da die Servomotoren beider Montierungen die gleichen Abmaße haben, ist ein Austausch wohl ohne großen Aufwand möglich.
Jetzt muß sich die Montierung erst einmal im nächtlichen Einsatz beweisen. Dazu wurde provisorisch eine Baader-Prismenklemme zur Aufnahme der Teleskope adaptiert, was aber in keinster Weise adäquat ist. Hier soll eine 3-Zoll Aufnahme folgen, später auf jeden Fall auch noch Abdeckungen für die Schneckengetriebe.